← Back to Current Work 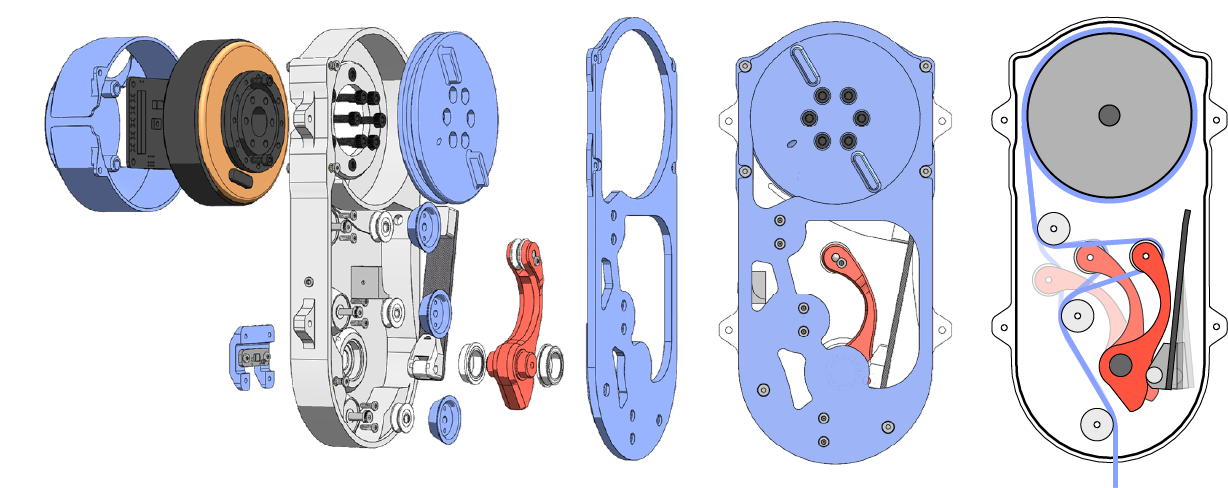
Actuator Design
I am redesigning a compact nonlinear series elastic actuator for cable-driven exoskeletons and other systems. The actuator uses a CAM-based spring mechanism to maintain sensitive low-force cable tension while smoothly transitioning to high-force assistance with the goal of improving actuator packaging, wearability, and controllability.
More coming soon!
Detailed write-ups, figures, and results for this project are on the way. Check back soon.